 環(huán)保在線
環(huán)保在線









詳細(xì)介紹
西門子6RA7028-6DV62-0 西門子6RA7028-6DV62-0
SIMOREG DC MASTER CONVERTER
WITH MICROPROCESSOR
FOR FOUR-QUADRANT DRIVES
CONNECTION (B6) A (B6) C
INPUT: 3-PHASE AC 400V, 75A
CONTROLLABLE FIELD RECTIFIER
D420/90 MREQ-GEG6V62
OUTPUT: DC 420V, 90A
OUTPUT US-RATING:DC420V, 79A
FIELD-INP. 400V,-OUTP. 325V,10A
西門子6RA7028-6DV62-0
 | 6RA7028-6DV62-0 SIMOREG DC MASTER CONVERTER WITH MICROPROCESSOR FOR FOUR-QUADRANT DRIVES CONNECTION (B6) A (B6) C INPUT: 3-PHASE AC 400V, 75A CONTROLLABLE FIELD RECTIFIER D420/90 MREQ-GEG6V62 OUTPUT: DC 420V, 90A OUTPUT US-RATING:DC420V, 79A FIELD-INP. 400V,-OUTP. 325V,10A |
上海拓關(guān)自動(dòng)化科技有限公司
:余工(銷售 維修 回收 技術(shù))
24小時(shí):(余工)
24小時(shí):(周麗媛)
工作
在實(shí)際應(yīng)用中,經(jīng)常需要通過DP總線獲取6SE70變頻器和6RA70直流調(diào)速器的內(nèi)部數(shù)據(jù),如:輸出的電壓、電流、電機(jī)實(shí)際轉(zhuǎn)速等。由于6RA70直流調(diào)速器與6SE70變頻器使用相同的DP通訊板卡—CBP2板,因而它們?cè)赑LC側(cè)的組態(tài)和編程方法基本*(具體實(shí)現(xiàn)方法請(qǐng)參考下載中心文檔A0049,《驅(qū)動(dòng)通訊基礎(chǔ)》),在實(shí)際應(yīng)用中僅發(fā)送的控制字稍有不同。為了獲取6SE70變頻器和6RA70直流調(diào)速器的內(nèi)部數(shù)據(jù),可以使用過程數(shù)據(jù)PZD。
1使用PZD傳送裝置內(nèi)部數(shù)據(jù)
1.1 6SE70中的實(shí)現(xiàn)方法與常用連接器
根據(jù)《6SE70使用大全V3.4使用大全》功能圖125,參數(shù)P734.01~P734.16為變頻器發(fā)送給DP主站的16個(gè)PZD字的參數(shù)化接口。P734.01默認(rèn)值為K0032,代表通過*個(gè)PZD將狀態(tài)字1發(fā)送的DP主站。同理若要求用第3個(gè)PZD將變頻器輸出電流值傳給DP主站,則 P734.03 = K0022(Output Amps);這樣在DP主站側(cè)所接收的第3個(gè)PZD的數(shù)值就是變頻器輸出電流。如圖1.1所示,可以通過參數(shù)r735.01到.16來(lái)從變頻器側(cè)讀數(shù)所發(fā)送的數(shù)值。
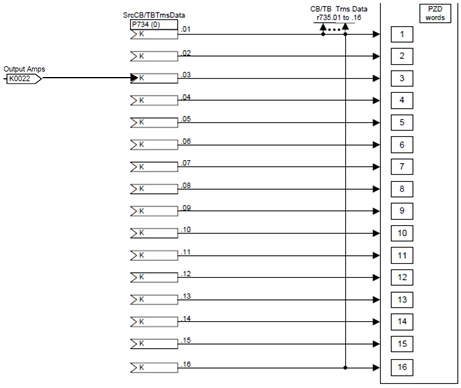
圖1.1 6SE70過程數(shù)據(jù)PZD參數(shù)化接口
常用連接器號(hào):
KK0020 實(shí)際速度
K0023 輸出電壓
K0025 直流母線電壓
K0030 控制字1
K0031 控制字2
K0032 狀態(tài)字1
K0033 狀態(tài)字2
(更多內(nèi)容請(qǐng)參考《6SE70使用大全V3.4使用大全》連接器表)
1.2 6RA70中的實(shí)現(xiàn)方法與常用連接器
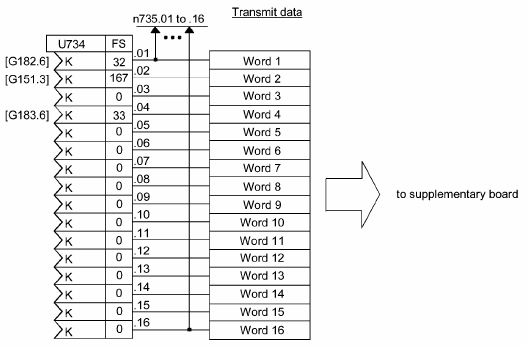
根據(jù)《 6RA70 系列V3.1全數(shù)字直流調(diào)速裝置中文說明書》功能圖Z110,參數(shù)U734.01~U734.16為調(diào)速器發(fā)送給DP主站的16個(gè)PZD字的參數(shù)化接口。如圖1.2:默認(rèn)的U734.01=K0032(狀態(tài)字1),U734.02=K0167(實(shí)際轉(zhuǎn)速),U734.04=K0033(狀態(tài)字2),若想要用第5個(gè)PZD將調(diào)速器器輸出實(shí)際電樞電壓值傳給DP主站,則 U734.05 = K0291;這樣在DP主站側(cè)所接收的第5個(gè)PZD的值就是實(shí)際電樞電壓值。
 西門子6RA7028-6DV62-0
西門子6RA7028-6DV62-0
圖1.2 6RA70 過程數(shù)據(jù)PZD參數(shù)化接口
常用連接器號(hào):
K0107 6 個(gè)電流波頭的平均值
K0118 電樞電流給定值
K0265 勵(lì)磁電流調(diào)節(jié)器輸入的實(shí)際值
K0030 控制字1
K0031 控制字2
K0032 狀態(tài)字1
K0033 狀態(tài)字2
(更多內(nèi)容請(qǐng)參考《 6RA70 系列V3.1全數(shù)字直流調(diào)速裝置中文說明書》連接器表)
2注意事項(xiàng):
2.1雙字的傳送
傳送雙字時(shí),需要注意必須連續(xù)將兩個(gè)PZD都設(shè)置為同樣的KK連接器才能完整傳送32位的雙字。如6SE70變頻器從第5個(gè)PZD開始傳送實(shí)際頻率KK0148到DP主站,則需設(shè)置P734.05 = KK0148, P734.06 = KK0148;否則僅能將雙字KK0148的高16位傳送過去。
2.2使用16個(gè)PZD
5種PPO類型中,PPO5可以支持zui多的10個(gè)PZD, CBP2板通訊支持zui多16個(gè)PZD。若想組態(tài)做多于10個(gè)PZD的通訊可以選擇DP從站時(shí)使用”MASTERDRIVES MASTER CBP2 DPV1”,這樣就可以繼續(xù)選擇PPO類型,zui高支持16個(gè)PZD。此種方法zui多可以組態(tài)40個(gè)字節(jié)的輸入和40個(gè)字節(jié)的輸出,總數(shù)不能超過80個(gè)字節(jié)。
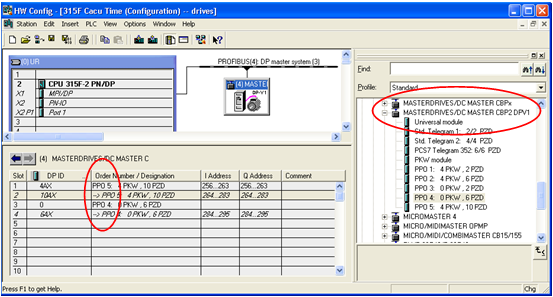
圖2.1 16個(gè)PZD的組態(tài)畫面
6RA70直流調(diào)速裝置安全停車的功能是打開繼電器觸點(diǎn)(端子109/110),以便在15ms時(shí)間內(nèi)分?jǐn)嘀鹘佑|器,6RA70直流調(diào)速裝置安全停車的功能通過端子XS-105/106或者106/107/108完成,功能圖如下圖所示。運(yùn)行中的直流調(diào)試裝置,給出安全停車命令,電機(jī)自由停車。

圖1 E-Stop功能圖
安全停車功能可用下列方法之一完成:
(1)開關(guān)操作(不需要復(fù)位)
如上圖所示,端子XS-105和XS-106之間加有開關(guān),端子XS-107和端子XS-108懸空,打開端子XS-105和XS-106之間的開關(guān)時(shí),安全停車起作用,6RA70調(diào)速裝置PMU上顯示o10.3(安全停車激活),當(dāng)此開關(guān)閉合,顯示的o10.3消失,表明安全停車沒有被激活。
(2)按鈕操作(需要復(fù)位)
如上圖所示,端子XS-107和端子XS-106間的按鈕是常閉點(diǎn),端子XS-108和XS-106間的按鈕是常開點(diǎn),XS-105懸空。當(dāng)打開XS-107和XS-106之間的常閉點(diǎn),6RA70調(diào)速裝置PMU上顯示o10.3(安全停車激活),當(dāng)此按鈕閉合后,PMU仍然顯示o10.3,需要使用端子XS-108和XS-106間的按鈕進(jìn)行復(fù)位,才能取消安全停車。
NCU 訂貨號(hào)
NCU561.5B 6FC5356-0BB15-0AB0可替代561.5
NCU571.5B 6FC5357-0BB15-0AB0可替代571.5
NCU572.5B 6FC5357-0BB25-0AB0
NCU573.5B 6FC5357-0BB35-0AB0可替換573.5
NCU730.2PN 6FC5373-0AA01-0AA2可替代720.2PN
NCU720.2PN 6FC5372-0AA01-0AAx
NCU561. 6FC5356-0BB15-0AA0
NCU571. 6FC5357-0BB15-0AA0
NCU710.3PN 6FC5371-0AA30-0AA0
NCU720.3PN 6FC5372-0AA30-0AA0
NCU730.3PN 6FC5373-0AA30-0AA0
NCU571.4 6FC5357-0BB14-0AA0
NCU572.4 6FC5357-0BB24-0AA0
NCU573.4 6FC5357-0BB34-0AE1
西門子PLC模塊6ES7223-1BH22-0xA8
產(chǎn)品信息

本機(jī)集成8輸入/6輸出共14個(gè)數(shù)字量I/O點(diǎn)。可連接2個(gè)擴(kuò)展模塊。6K字節(jié)程序和數(shù)據(jù)存儲(chǔ)空間。4個(gè)獨(dú)立的30kHz高速計(jì)數(shù)器,2路獨(dú)立的20kHz高速脈沖輸出。1個(gè)RS485通訊/編程口,具有PPI通訊協(xié)議、MPI通訊協(xié)議和自由方式通訊能力。非常適合于小點(diǎn)數(shù)控制的微型控制器。

本機(jī)集成14輸入/10輸出共24個(gè)數(shù)字量I/O點(diǎn)。可連接7個(gè)擴(kuò)展模塊,zui大擴(kuò)展至168路數(shù)字量I/O點(diǎn)或35路模擬量I/O 點(diǎn)。13K字節(jié)程序和數(shù)據(jù)存儲(chǔ)空間。6個(gè)獨(dú)立的30kHz高速計(jì)數(shù)器,2路獨(dú)立的20kHz高速脈沖輸出,具有PID控制器。1個(gè)RS485通訊/編程口,具有PPI通訊協(xié)議、MPI通訊協(xié)議和自由方式通訊能力。I/O端子排可很容易地整體拆卸。是具有較強(qiáng)控制能力的控制器。

本機(jī)集成14輸入/10輸出共24個(gè)數(shù)字量I/O點(diǎn),2輸入/1輸出共3個(gè)模擬量I/O點(diǎn),可連接7個(gè)擴(kuò)展模塊,zui大擴(kuò)展值至168路數(shù)字量I/O點(diǎn)或38路模擬量I/O點(diǎn)。20K字節(jié)程序和數(shù)據(jù)存儲(chǔ)空間,6個(gè)獨(dú)立的高速計(jì)數(shù)器(100KHz),2個(gè)100KHz的高速脈沖輸出,2個(gè)RS485通訊/編程口,具有PPI通訊協(xié)議、MPI通訊協(xié)議和自由方式通訊能力。本機(jī)還新增多種功能,如內(nèi)置模擬量I/O,位控特性,自整定PID功能,線性斜坡脈沖指令,診斷LED,數(shù)據(jù)記錄及配方功能等。是具有模擬量I/O和強(qiáng)大控制能力的新型CPU。

本機(jī)集成24輸入/16輸出共40個(gè)數(shù)字量I/O 點(diǎn)。可連接7個(gè)擴(kuò)展模塊,zui大擴(kuò)展至248路數(shù)字量I/O 點(diǎn)或35路模擬量I/O 點(diǎn)。13K字節(jié)程序和數(shù)據(jù)存儲(chǔ)空間。6個(gè)獨(dú)立的30kHz高速計(jì)數(shù)器,2路獨(dú)立的20kHz高速脈沖輸出,具有PID控制器。2個(gè)RS485通訊/編程口,具有PPI通訊協(xié)議、MPI通訊協(xié)議和自由方式通訊能力。I/O端子排可很容易地整體拆卸。用于較高要求的控制系統(tǒng),具有更多的輸入/輸出點(diǎn),更強(qiáng)的模塊擴(kuò)展能力,更快的運(yùn)行速度和功能更強(qiáng)的內(nèi)部集成特殊功能。可*適應(yīng)于一些復(fù)雜的中小型控制系統(tǒng)。
功能與設(shè)計(jì)
CPU單元設(shè)計(jì)
集成的24V負(fù)載電源:可直接連接到傳感器和變送器(執(zhí)行器),CPU 221,222具有180mA輸出, CPU 224,CPU 224XP,CPU 226分別輸出280,400mA。可用作負(fù)載電源。
不同的設(shè)備類型
CPU 221~226各有2種類型CPU,具有不同的電源電壓和控制電壓。
本機(jī)數(shù)字量輸入/輸出點(diǎn)
CPU 221具有6個(gè)輸入點(diǎn)和4個(gè)輸出點(diǎn),CPU 222具有8個(gè)輸入點(diǎn)和6個(gè)輸出點(diǎn),CPU 224具有14個(gè)輸入點(diǎn)和10個(gè)輸出點(diǎn),CPU 224XP具有14個(gè)輸入點(diǎn)和10個(gè)輸出點(diǎn),CPU 226具有24個(gè)輸入點(diǎn)和16個(gè)輸出點(diǎn)。
本機(jī)模擬量輸入/輸出點(diǎn)
CPU 224XP具有2個(gè)輸入點(diǎn),1個(gè)輸出點(diǎn)。
中斷輸入
允許以極快的速度對(duì)過程信號(hào)的上升沿作出響應(yīng)。
高速計(jì)數(shù)器
-CPU 221/222
4個(gè)高速計(jì)數(shù)器(30KHz),可編程并具有復(fù)位輸入,2個(gè)獨(dú)立的輸入端可同時(shí)作加、減計(jì)數(shù),可連接兩個(gè)相位差為90°的A/B相增量編碼器
-CPU 224/224XP/226
6個(gè)高速計(jì)數(shù)器(30KHz),具有CPU 221/222相同的功能。
模擬電位器
CPU 221/222 1個(gè)
CPU 224/224XP/226 2個(gè)
2路高頻率脈沖輸出(zui大20KHz),用于控制步進(jìn)電機(jī)或伺服電機(jī)實(shí)現(xiàn)定位任務(wù)。
實(shí)時(shí)時(shí)鐘
例如為信息加注時(shí)間標(biāo)記,記錄機(jī)器運(yùn)行時(shí)間或?qū)^程進(jìn)行時(shí)間控制。
EEPROM存儲(chǔ)器模塊(選件)
可作為修改與拷貝程序的快速工具(無(wú)需編程器),并可進(jìn)行輔助軟件歸檔工作。
電池模塊
用于長(zhǎng)時(shí)間數(shù)據(jù)后備。用戶數(shù)據(jù)(如標(biāo)志位狀態(tài),數(shù)據(jù)塊,定時(shí)器,計(jì)數(shù)器)可通過內(nèi)部的超級(jí)電容存貯大約5天。選用電池模塊能延長(zhǎng)存貯時(shí)間到200天(10年壽命)。電池模塊插在存儲(chǔ)器模塊的卡槽中。
編程
STEP 7-Micro/WIN32 V3.1編程軟件可以對(duì)所有的CPU 221/222/224/224XP/226功能進(jìn)行編程。同時(shí)也可以使用STEP 7-Micro/WIN16 V2.1軟件包,但是它只支持對(duì)S7-21x同樣具有的功能進(jìn)行編程。
STEP 7-Micro/DOS不能對(duì)CPU 221/222/224/224XP/226編程。如果使用PG/PC的串口編程,則需要使用PC/PPI電纜。
如果使用STEP 7-Micro/WIN32 V3.1編程軟件,則也可以通過SIMATIC CP 5511或CP 5611編程。在這種情況下,通訊速率可高達(dá)187.5kbit/s。 可以利用PC/PPI 電纜和自由口通訊功能把 S7-200 CPU 連接到許多和RS-232標(biāo)準(zhǔn)兼容的設(shè)備。
有兩種不同型號(hào)的 PC/PPI 電纜:
帶有RS-232口的隔離型 PC/PPI 電纜,用5個(gè)DIP開關(guān)設(shè)置波特率和其它配置項(xiàng) (見下圖)。
帶有RS-232口的非隔離型 PC/PPI 電纜,用4個(gè)DIP開關(guān)設(shè)置波特率。 有關(guān)非隔離型PC/PPI電纜的技術(shù)規(guī)范,請(qǐng)參閱S7-200 可編程控制器系統(tǒng)手冊(cè)。
西門子6RA7028-6DV62-0
1847年指針式電報(bào)機(jī)的發(fā)明和1866年實(shí)用發(fā)電機(jī)工作原理的發(fā)現(xiàn)為西門子公司的成功奠定了基礎(chǔ)。維爾納?馮?西門子被認(rèn)為是現(xiàn)代電氣工程的奠基者之一。“西門子-哈爾斯克”電報(bào)機(jī)制造公司在成立之初只有10名員工。短短幾十年內(nèi),公司就從一家專注于電報(bào)機(jī)、電動(dòng)觸發(fā)鐵路警鈴、導(dǎo)線絕緣和水表等儀器的作坊,發(fā)展成為上大的電氣工程技術(shù)公司之一。在其170年的歷史中,西門子克服了一系列重大挑戰(zhàn),包括兩次大戰(zhàn)的影響及其帶來(lái)的資產(chǎn)損失。此外,西門子在經(jīng)歷了十多年前的合規(guī)危機(jī)后,也*轉(zhuǎn)變?yōu)榱疂崢I(yè)務(wù)的*。,西門子擁有35萬(wàn)名員工,并大力在電氣化、自動(dòng)化和數(shù)字自動(dòng)化和數(shù)字化領(lǐng)域拓展業(yè)務(wù)。西門子在數(shù)字化領(lǐng)域的早期布局和公司歷其它重要里程碑同樣契合。如今,西門子已經(jīng)成為數(shù)字化領(lǐng)域的者,例如利用MindSphere來(lái)將設(shè)備與連接到云端,從而創(chuàng)造出全新的商業(yè)。西門子早在十年前就已經(jīng)為其數(shù)字化專長(zhǎng)奠定基礎(chǔ)。從那時(shí)起,西門子先后投入了超過100億歐元以進(jìn)一步拓展其作為數(shù)字化推動(dòng)者之一的地位。

將化作為危機(jī)的有效途徑
自成立初期開始,西門子就不斷展現(xiàn)出開拓新市場(chǎng)的能力。19世紀(jì)50年代普魯士電報(bào)市場(chǎng)的銷售危機(jī)迫使西門子開始尋找新市場(chǎng),并瞄準(zhǔn)擴(kuò)張——例如在鋪設(shè)了一條長(zhǎng)達(dá)9000公里的電報(bào)網(wǎng)絡(luò),以及從英國(guó)鋪設(shè)海底電纜。繼1850年和1855年分別在倫敦和圣彼得堡設(shè)立辦事處后,西門子迅速在其他地區(qū)建立起了辦事處,如布魯塞爾(1871年)、巴黎和海牙(1879年)、維也納和華沙(1879年)、斯德哥爾摩和都靈(1880年)、紐約(1886年)、東京(1887年)、里約熱內(nèi)盧(1888年)、布達(dá)佩斯(1890年)、芝加哥(1892年)和約翰內(nèi)斯堡(1895年)。,西門子的業(yè)務(wù)遍布近200個(gè)。
top of page
關(guān)于西門子在
西門子股份公司是的技術(shù)企業(yè),創(chuàng)立于1847年,業(yè)務(wù)遍及200多個(gè),專注于電氣化、自動(dòng)化和數(shù)字化領(lǐng)域。作為大的能源和資源節(jié)約型技術(shù)供應(yīng)商之一,西門子在發(fā)電和輸電解決方案、基礎(chǔ)設(shè)施解決方案、工業(yè)自動(dòng)化、驅(qū)動(dòng)和解決方案,以及成像設(shè)備和實(shí)驗(yàn)室診斷等領(lǐng)域占據(jù)地位。西門子自1872年,140余年來(lái)以創(chuàng)新的技術(shù)、的解決方案和產(chǎn)品堅(jiān)持不懈地對(duì)的發(fā)展提供支持,并以出眾的品質(zhì)和令人信賴的可靠性、的技術(shù)成就、不懈的創(chuàng)新追求,在業(yè)界獨(dú)樹一幟。2016財(cái)年(2015年10月1日至2016年9月30日),西門子在的總營(yíng)收達(dá)到64.4億歐元,擁有約31000名員工。西門子已經(jīng)發(fā)展成為社會(huì)和經(jīng)濟(jì)不可分割的一部分,并竭誠(chéng)與攜手合作,共同致力于實(shí)現(xiàn)可發(fā)展。
西門子變頻器有兩路模擬量輸入6RA7028-6DV62-0

相關(guān)參數(shù)以in000和in001區(qū)分,可以通過P0756分別設(shè)置每個(gè)通道屬性。 參數(shù)號(hào)碼設(shè)定值參數(shù)功能說明6SE6440-2UC25-5CA1
P0756 =0 單極性電壓輸入(0 至 +10V) “帶監(jiān)控”是指模擬通 道具有監(jiān)控功能,當(dāng)斷線或信號(hào)超限,報(bào)故障F0080 =1 帶監(jiān)控的單極性電壓輸入(0 至 +10V) =2 單極性電流輸入(0 至 20mA)
=3 帶監(jiān)控的單極性電流輸入(0 至 20mA) =4 雙極性電壓輸入(-10V 至 +10V) 除了上面這些設(shè)定范圍,還可以支持常見的2~10V和4~20mA這些模擬標(biāo)定方式。
以模擬量通道1電壓信號(hào)2~10V 作為頻率給定,需要設(shè)置:
P0757[0] 2 電壓2V對(duì)應(yīng)0%的標(biāo)度, P0758[0] 0% 即0Hz
P0759[0] 10 電壓10V對(duì)應(yīng)*的標(biāo)度 P0760[0] * 即50Hz
P0761[0] 2 死區(qū)寬度 10對(duì)應(yīng)50HZ
以模擬量通道2電流信號(hào)4~20mA作為頻率給定,需要設(shè)置:
P0757[1] 4 電流4mA對(duì)應(yīng)0%的標(biāo)度, P0758[1] 0% 即0Hz
P0759[1] 20 電流20mA對(duì)應(yīng)*的標(biāo) P0760[1] * 度,即50Hz P0761[1] 4 死區(qū)寬度

模擬量輸出功能 有兩路模擬量輸出,相關(guān)參數(shù)以in000和in001區(qū)分,出廠值為0~20mA輸出,可以
標(biāo)定為4~20mA輸出(P0778=4),如果需要電壓信號(hào)可以在相應(yīng)端子并聯(lián)一支500歐姆電阻。
需要輸出的物理量可以通過P0771設(shè)置。
P0771 =21 實(shí)際頻率 =25 輸出電壓 =26 直流電壓 =27 輸出電流
模擬輸出信號(hào)與所設(shè)置的物理量呈線性關(guān)系
輸出信號(hào)標(biāo)定為0~50 Hz輸出4~20mA
P0777 0% P0778 4 0Hz對(duì)應(yīng)輸出電流4mA P0779 * P0780 20 50Hz對(duì)應(yīng)輸出電流20mA P1080 zui低頻率這兩個(gè)參數(shù)用于限制電機(jī)的zui低和zui P1082 zui高頻率高運(yùn)行頻率,不受頻率給定源的影響
P1091- P1094 跳躍頻率,避開機(jī)械共振點(diǎn)MM440變頻器可以設(shè)置四段跳躍率, 通過P1101設(shè)置頻帶寬度
停車指的是將電機(jī)的轉(zhuǎn)速降到零速的操作,在MM440變頻器支持的停車方式包括:
OFF1 變頻器按照P1121所設(shè)定的斜坡下降時(shí)間由全速降為零速 一般場(chǎng)合OFF2 變頻器脈沖輸出,電機(jī)慣性滑行狀態(tài),直至速度為零速設(shè)備需要急停,
配合機(jī)械抱閘
OFF3 變頻器按P1135所設(shè)定的斜坡下降時(shí)間由全速降為零速設(shè)備需要快速停
車
為了縮短電機(jī)減速時(shí)間,MM440變頻器支持以下兩種制動(dòng)方式,可以實(shí)現(xiàn)將電機(jī)快速制動(dòng)
制動(dòng)方式功能解釋相關(guān)參數(shù)
直流制動(dòng)變頻器向電機(jī)定子注入直流 P1230=1使能直流制動(dòng) P1232=直流制動(dòng)強(qiáng)度
P1233=直流制動(dòng)持續(xù)時(shí)間 P1234=直流制動(dòng)的起始頻率 能耗制動(dòng)
變頻器通過制動(dòng)單元和制動(dòng)電阻,將 電機(jī)回饋的能量以熱能的形式消耗掉
P1237=5(*投入),能耗制動(dòng)的工作停止周期 P1254=0 P1240=0,禁止直流電壓控制器,從而防止斜坡下降時(shí)間的自動(dòng)延長(zhǎng) 第十一節(jié) 矢量控制
矢量控制:將測(cè)得變頻器實(shí)際輸出電流按空間矢量的方式進(jìn)行分解,形成轉(zhuǎn)矩電流分量與磁通電
流分量?jī)蓚€(gè)電流閉環(huán),同時(shí)又可借助編碼器或內(nèi)置觀測(cè)器模型來(lái)構(gòu)成速度閉環(huán),這種雙閉環(huán)控制
方式可以改善變頻器的動(dòng)態(tài)響應(yīng)能力,減小滑差,保證系統(tǒng)速度穩(wěn)定,確保低頻時(shí)的轉(zhuǎn)矩輸出。
典型應(yīng)用場(chǎng)合:行車,皮帶運(yùn)輸機(jī),擠出機(jī),空氣壓縮機(jī)等。
為了在電機(jī)數(shù)學(xué)模型的精確性,以確保的到較為理想的矢量控制效果。必須進(jìn)行電機(jī)優(yōu)化操作, 其優(yōu)化步驟如下:
如果已經(jīng)進(jìn)行了恢復(fù)出廠設(shè)置和快速調(diào)試,可以直接進(jìn)行電機(jī)的靜態(tài)識(shí)別和動(dòng)態(tài)優(yōu)化。
注意:電機(jī)動(dòng)態(tài)優(yōu)化必須脫開機(jī)械負(fù)載
恢復(fù)出廠設(shè)置 快速調(diào)試 電機(jī)靜態(tài)識(shí)別 電機(jī)動(dòng)態(tài)優(yōu)化
電機(jī)靜態(tài)識(shí)別P1910 =1 識(shí)別所有電機(jī)數(shù)據(jù)并修改,并將這些數(shù)據(jù)應(yīng)用于控制器
激活電機(jī)數(shù)據(jù)識(shí)別后將顯示報(bào)警A0541,需要馬上啟動(dòng)變頻器 電機(jī)動(dòng)態(tài)優(yōu)化P1300 =20 選擇矢量控制方式
P1960 =1 激活電機(jī)動(dòng)態(tài)優(yōu)化后,將顯示報(bào)警A0542,需要馬上啟動(dòng)變 頻器,電機(jī)會(huì)突然加速
 環(huán)保在線
環(huán)保在線